2024
July 10






2023








2022





2021




2020



January 18
Dr. Melvin Wong Appointed Postdoctoal Researcher at EPFL
January 9
Dr. David López Flores Appointed Associate Researcher at Universidad Nacional Autónoma de México

2019
November 21
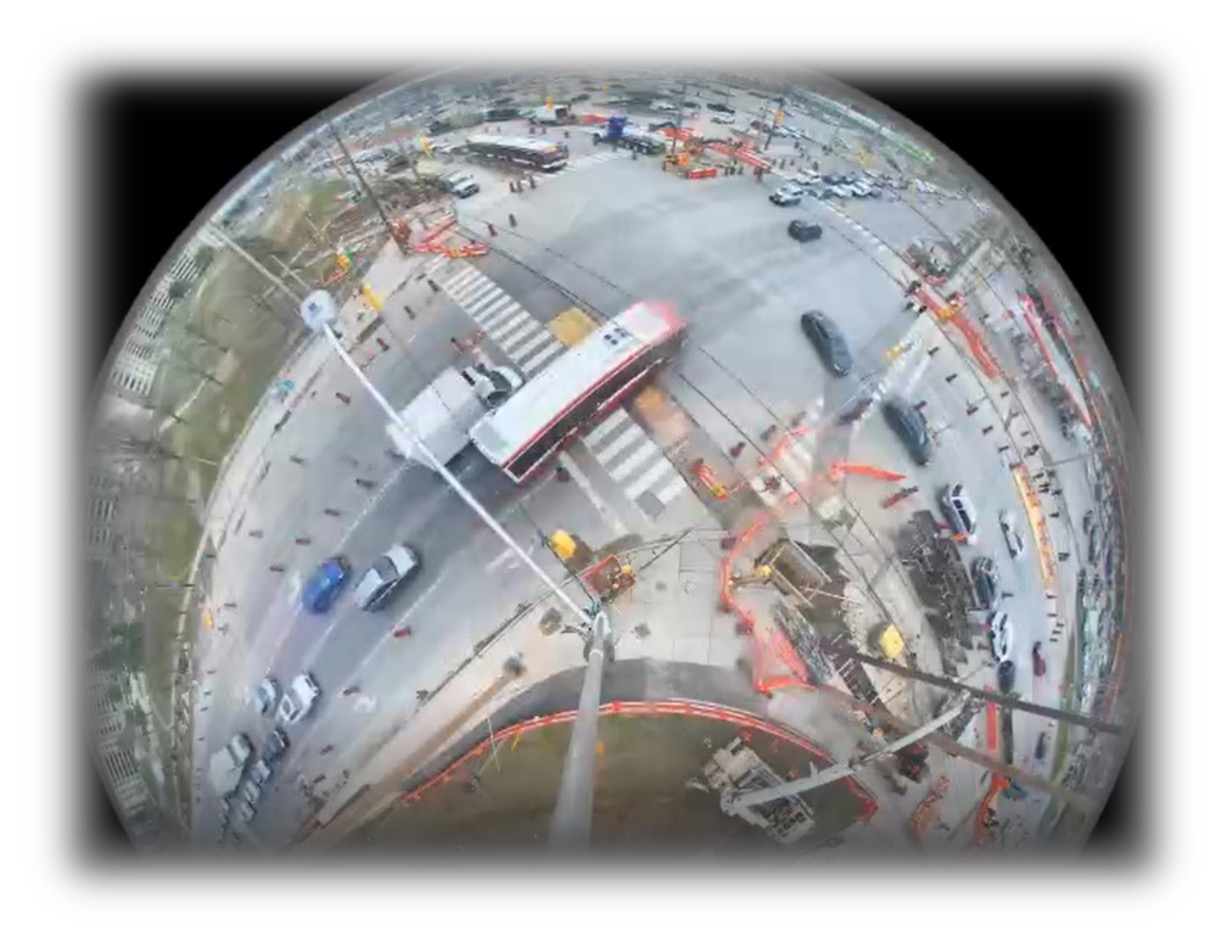
LiTrans @ 99th TRB Annual Meeting
Our group will be well represented at the Transportation Research Board (TRB) 99th Annual Meeting to be held on January 12–16, 2020.
October 14
LiTrans @ 2019 IEEE Int. Smart Cities Conference

In the context of Smart Mobility research, LiTrans @ Ryerson University is presenting following work at IEEE 5th International Smart Cities Conference (Oct 14-17, 2019).


July 8
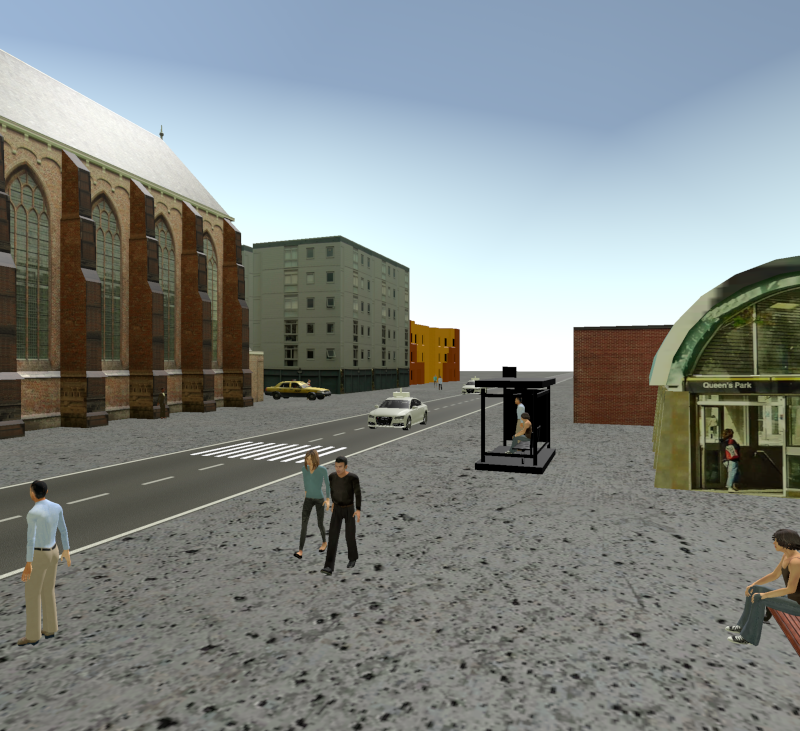
Call for Participants: Behavioural Analysis in AVs using Immersive VR
We are looking for volunteers to participate in an immersive virtual reality based experiments to understand human behaviour when travelling in autonomous vehicles.
June 20
Invited Speaker at the Deep Reinforcement Learning Summit 2019
Our lab’s research on training CAV using naturalistic data from VR was invited to be presented at the Deep Reinforcement Learning Summit 2019 in San Francisco.
June 5
Panel on Furture Mobility and Smart Transportation
On June 05, 2019, LiTrans organized a panel discussion on the future of mobility and smart transportation at the Centre for Urban Innovation, Ryerson University.

May 4
IEEE International Smart Cities Webinar
Our lab’s research on distributed traffic management system and CAV routing is invited to be presented at a webinar on May 16, 2019, hosted by IEEE International Smart Cities.
April 25
LiTrans Research Featured in MIT Tech Review
Our new work on multiobjective autonomous braking system training using naturalistic data & deep reinforcement learning, features in MIT Technology Review.
April 1
Making Transportation Networks Smarter: Bilal Farooq And LiTrans Lab
New on our blog! Prof. @billjee is creating the transportation network of the future using #VR and #blockchaintechnology @RyersonResearch @RyersonEngineer https://t.co/m2sPkORApP
— City Building TMU (@CityBuildingTMU) April 1, 2019
March 9
Dr. Anae Sobhani Appointed Assistant Professor at Utrecht University
LiTrans alumni, Dr. Sobhani appointed as an Assistant Professor at Utrecht University, the Netherlands.

February 25
Visit by Kinga Surma, Parliamentary Assistant, Ministry of Transportation, Ontario
Kinga Surma, Parliamentary Assistant, Ministry of Transportation, Ontario met with LiTrans, Ryerson University students to learn more about their research on emerging transportation technologies and services.

February 20
IEEE ITS Conference 2019 Special Session
We are organizing a special session on Cybersecurity and Privacy in Emerging Mobility Technologies and Services at IEEE ITSC2019 this October in New Zealand.
January 10
LiTrans @ 98th TRB Annual Meeting
Our group will be presenting at the Transportation Research Board (TRB) 98th Annual Meeting to be held on January 13–17, 2019.
2018
September 16
LiTrans @ 2018 IEEE Int. Smart Cities Conference
In the context of Smart Mobility research, LiTrans @ Ryerson University is presenting following work at IEEE 4th International Smart Cities Conference (Sep 16-19, 2018).
August 9
AI@Civil.Eng 2018-2019 Seminar Series (August 2018)
Seminar presented by Professor Mario Cools from University of Liège
March 22
AI@Civil.Eng 2018-2019 Seminar Series (March 2018)
Seminar presented by Arash Kalatian, PhD Student at Ryerson University
2017
July 7
LITrans has moved to Toronto
Starting May 1, 2017, Laboratory of Innovations in Transportation has moved to Ryerson University.