Virtual Reality based Digital Twin
Virtual Immersive Reality Environment (VIRE) for travel behaviour experiments.
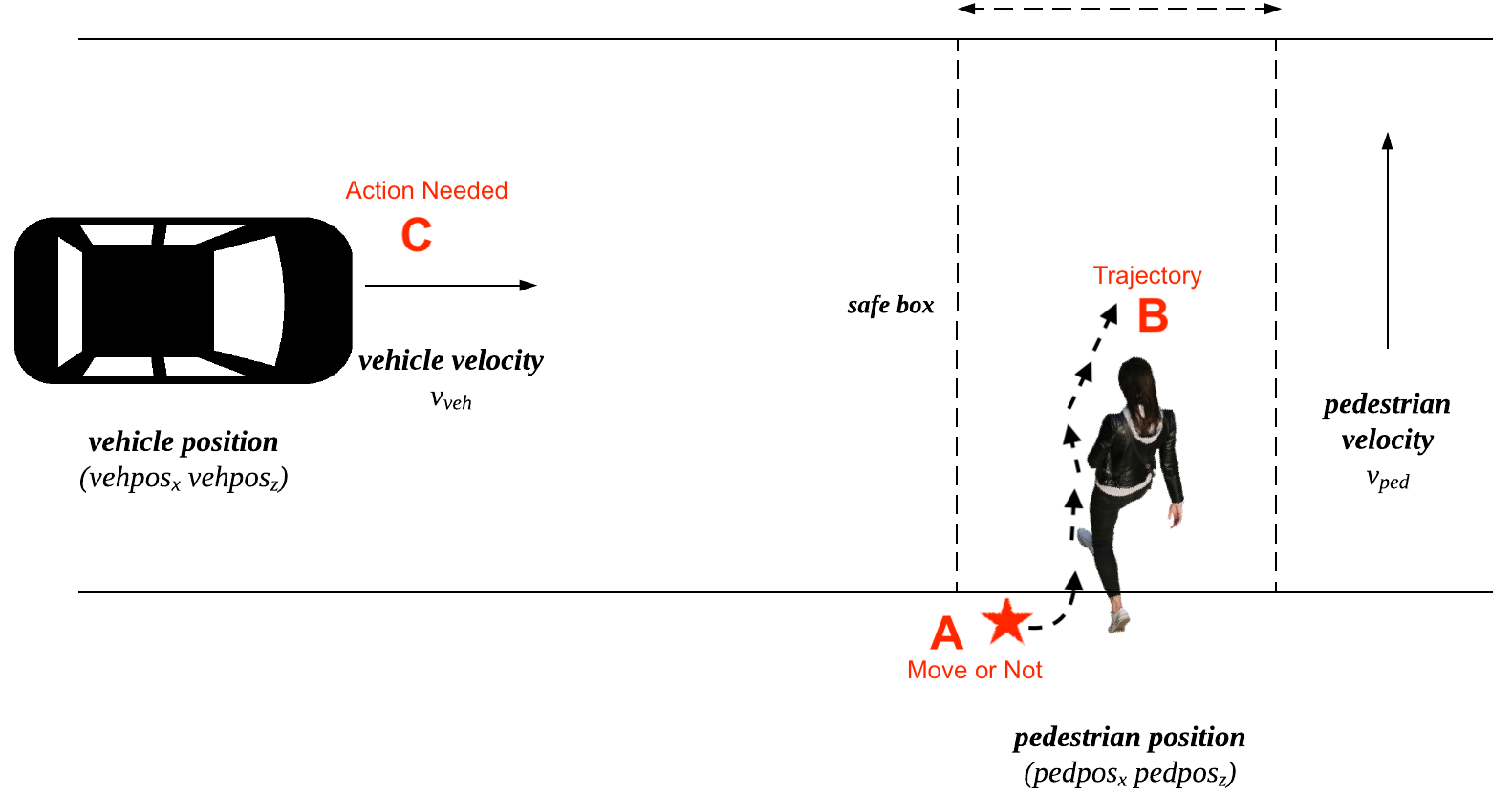
Currently, the interactions between drivers and pedestrians on urban roads are mainly in the form of a silent agreement. Eye contact between the two agents, or head orientations and body movements of the pedestrians observed by the drivers, are some of the behaviours that establish this silent agreement. Drivers then continuously try to anticipate the next actions of pedestrians based on what they see. At the same time, pedestrians decide on their behavioural choices based on what they perceive from the vehicles and drivers. To replicate these interactions in an automated urban environment, immersive virtual reality experiments are designed to collect detailed behavioural data from pedestrians. Interpretable deep learning models are then developed that can predict pedestrian walking behaviour when crossing urban roads. Multi-objective reinforcement learning is used to train the AV that can anticipate the pedestrian’s actions and react while incorporating pedestrian safety as well as passenger comfort. The findings of this study are not only useful for the manufacturers but can also help municipalities in the reassessment of current policies, practices, design, rules and regulations in order to prepare them for the mobility technologies of the future.
Kalatian, A., Farooq, B., 2021. Decoding pedestrian and automated vehicle interactions using immersive virtual reality and interpretable deep learning. Transportation Research Part C: Emerging Technologies. 124, 102962.
Vasquez, R., & Farooq, B. (2019) Multi-objective autonomous braking system using naturalistic dataset. In 2019 IEEE Intelligent Transportation Systems Conference (ITSC), pp. 4348-4353. IEEE.
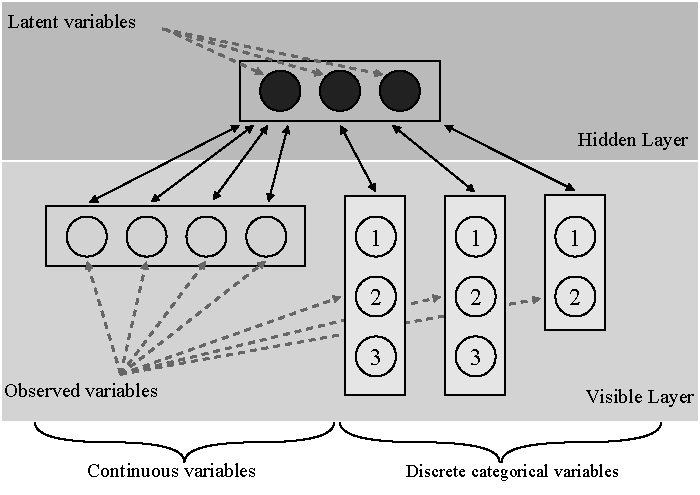
Efficient and robust machine learning frameworks for explaining latent behaviour are becoming more important with the increased use of very large scale multiple discrete-continuous (MDC) choice data in travel behaviour modelling. In such type of data, there are various complex inter-dependencies because of the multiple unobserved heterogeneous population behaviour types. Moreover, advanced utility based modelling techniques may not be able to capture the different facets of high-dimensional information and the estimation techniques used may not be able to manage such large data. This paper propose a novel generative modelling methodology for MDC data based on a Restricted Boltzmann Machine framework. We consider a large scale regional travel survey which contains information on 624,845 individual trips. Trip mode, purpose and distance measures are specifically considered in our case study. Our preliminary studies have demonstrated the applicability of the proposed method and could significantly improve the understanding of latent behaviour in MDC choice data.
Wong, M., Farooq, B. (2020) A bi-partite generative model framework for analyzing and simulating large scale multiple discrete-continuous travel behaviour data. Transportation Research Part C: Emerging Technologies. 110 (2020): 247-268.